המערכת של זרם חשמלי תלת פאזי פותחה בסוף המאה ה-19 על ידי המדען הרוסי M.O. Dolivo-Dobrovolsky. שלושה שלבים, שהמתח בהם מוסט זה ביחס לזה ב-120 מעלות, בין היתר, מקלים על יצירת שדה מגנטי מסתובב. תחום זה נושא עמו את הרוטורים של המנועים הא-סינכרוניים התלת פאזיים הנפוצים והפשוטים ביותר.
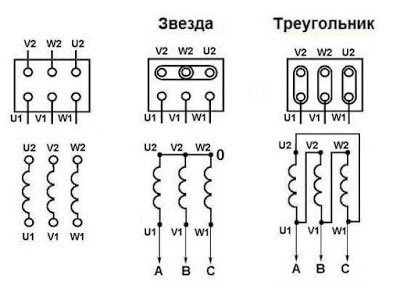
שלושת פיתולי הסטטור של מנועים חשמליים כאלה מחוברים ברוב המקרים על פי ערכת "כוכב" או "משולש". בספרות הלועזית משתמשים במונחים "כוכב" ו"דלתא", המקוצרים כ-S ו-D. הכינוי המנמוני D ו-Y נפוץ יותר, מה שעלול לעיתים להוביל לבלבול - האות D יכולה להיות מסומנת גם "כוכב" וגם "משולש".
תוֹכֶן
מתחי פאזה וקווים
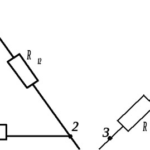
כדי להבין את ההבדלים בין שיטות חיבור הפיתולים, תחילה עליך להבין עם המושגים של מתח ומתח ליניארי. מתח שלב הוא המתח בין ההתחלה לסוף של שלב אחד. ליניארי - בין אותן מסקנות של שלבים שונים.
עבור רשת תלת פאזית, מתחי קו לקו הם מתחים בין פאזות, למשל, A ו-B, ומתחי פאזה נמצאים בין כל פאזה לבין המוליך הנייטרלי.
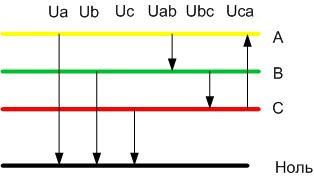
אז המתחים Ua, Ub, Uc יהיו פאזה, ו-Uab, Ubc, Uca יהיו ליניאריים. המתחים הללו שונים. אז, עבור רשת ביתית ותעשייתית של 0.4 קילו וולט, המתחים הליניאריים הם 380 וולט, ומתחי הפאזה הם 220 וולט.
חיבור פיתולי מנוע לפי ערכת "כוכב".
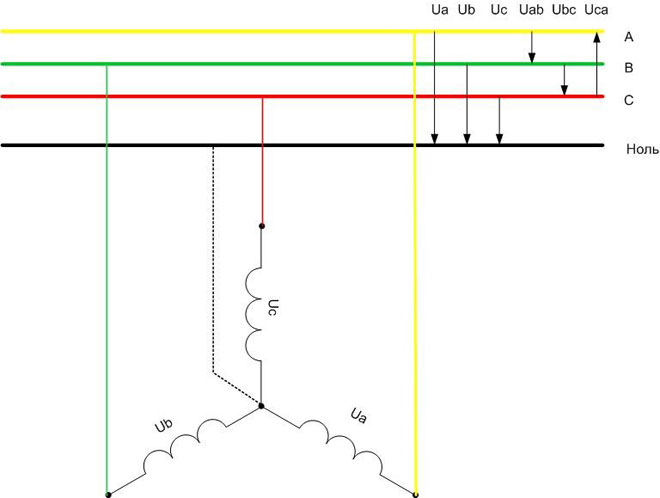
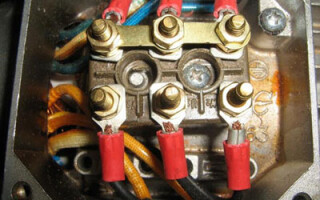
כאשר מחברים את השלבים של מנוע חשמלי עם כוכב, שלושת הפיתולים מחוברים זה לזה בתחילתם בנקודה משותפת. הקצוות החופשיים מחוברים כל אחד לשלב שלו ברשת. במקרים מסוימים, הנקודה המשותפת מחוברת לאוטובוס הנייטרלי של מערכת אספקת החשמל.
ניתן לראות מהאיור כי עבור הכללה זו, מתח הפאזה של הרשת מוחל על כל סלילה (עבור רשתות של 0.4 קילו וולט - 220 וולט).
חיבור פיתולי המנוע לפי ערכת ה"משולש".
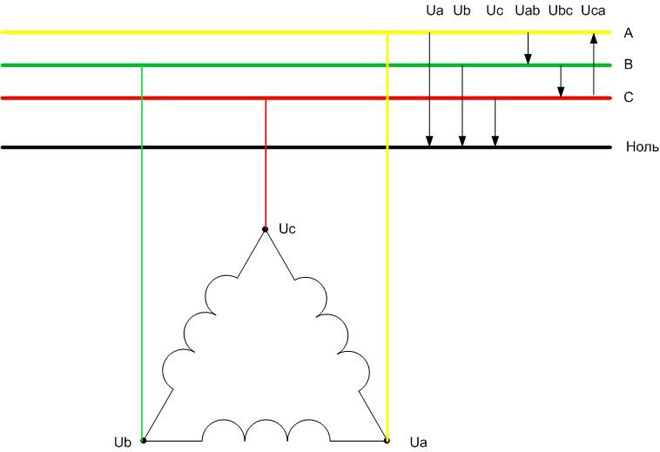
עם ערכת ה"משולש", קצוות הפיתולים מחוברים זה לזה בסדרה. מסתבר שזה סוג של עיגול, אבל בספרות השם "משולש" מקובל בגלל הסגנון המשמש לעתים קרובות. אין איפה לחבר את החוט הנייטרלי בהתגלמות זו.
ברור שהמתחים המופעלים על כל פיתול יהיו ליניאריים (380 וולט לכל פיתול).
השוואה של סכימות חיבור זו עם זו
כדי להשוות את שתי הסכימות זו עם זו, יש צורך לחשב את הכוח החשמלי שפותח על ידי המנוע החשמלי במהלך הכללה כזו או אחרת. לשם כך, יש לשקול את המושגים של זרמים ליניאריים (Ilin) ופאזה (Iphase).זרם הפאזה הוא הזרם הזורם דרך פיתול הפאזה. זרם הקו זורם דרך המוליך המחובר למסוף של הפיתול.
ברשתות עד 1000 וולט, מקור החשמל הוא שַׁנַאי, שהפיתול המשני שלו מופעל על ידי "כוכב" (אחרת אי אפשר לארגן חוט ניטרלי) או גנרטור שהפיתולים שלו מחוברים באותו אופן.
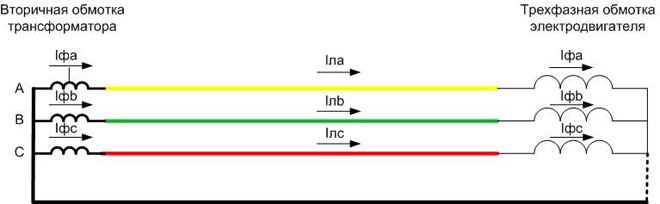
האיור מראה שכאשר מחובר ל"כוכב", הזרמים במוליכים והזרמים בפיתולי המנוע שווים. זרם הפאזה נקבע על ידי מתח הפאזה:
![\[I_faz=\frac{U_faz}{Z}\]](https://volt.housecope.com/wp-content/ql-cache/quicklatex.com-f4518d61a0fe68758ecd5221efdc8d3a_l3.png "מעובד על ידי QuickLaTeX.com")
כאשר Z היא ההתנגדות של סלילה של שלב אחד, ניתן לקחת אותם שווים. אפשר לכתוב את זה
![\[I_faz=I_lin\]](https://volt.housecope.com/wp-content/ql-cache/quicklatex.com-be70a1b78bb7c7fd8a17275f34f188ee_l3.png "מעובד על ידי QuickLaTeX.com")
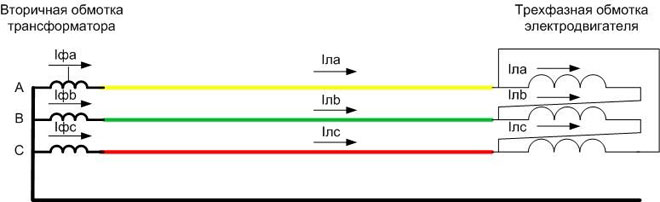
עבור חיבור דלתא, הזרמים שונים - הם נקבעים על ידי המתחים הליניאריים המופעלים על ההתנגדות Z:
![\[I_faz=\frac{U_lin}{Z}\]](https://volt.housecope.com/wp-content/ql-cache/quicklatex.com-04741f4af117efbb0661c26c4ee10334_l3.png "מעובד על ידי QuickLaTeX.com")
לכן, למקרה זה  .
.
כעת נוכל להשוות את ההספק הכולל ( ), נצרך על ידי מנועים חשמליים עם סכמות שונות.
), נצרך על ידי מנועים חשמליים עם סכמות שונות.
- עבור חיבור כוכב, ההספק הכולל הוא
 ;
; - עבור חיבור דלתא, ההספק הכולל הוא
 .
.
לפיכך, כאשר מופעל על ידי "כוכב", המנוע החשמלי מפתח כוח נמוך פי שלושה מאשר בחיבור לדלתא. זה גם מוביל להשלכות חיוביות אחרות:
- זרמי התחלה מופחתים;
- פעולת המנוע והתנעה הופכים חלקים יותר;
- המנוע החשמלי מתמודד היטב עם עומסי יתר לטווח קצר;
- המשטר התרמי של המנוע האסינכרוני הופך עדין יותר.
הצד השני של המטבע הוא שמנוע מפותל בכוכב אינו יכול לפתח כוח מרבי. במקרים מסוימים, ייתכן שהמומנט אפילו לא יספיק כדי לסובב את הרוטור.
דרכים להחליף מעגלי כוכב-דלתא
העיצוב של רוב המנועים החשמליים מאפשר מעבר מתכנית חיבור אחת לאחרת.לשם כך, ההתחלה והסוף של הפיתולים מוצגים בטרמינל כך שבאמצעות שינוי מיקום שכבות העל, ניתן ליצור "משולש" מ"כוכב" ולהיפך.
בעל המנוע החשמלי בעצמו יכול לבחור את מה שהוא צריך - התחלה רכה עם זרמי התנעה קטנים ופעולה חלקה או הכוח הגדול ביותר שפיתח המנוע. אם אתה צריך את שניהם, אתה יכול לעבור אוטומטית באמצעות מגע רבי עוצמה.
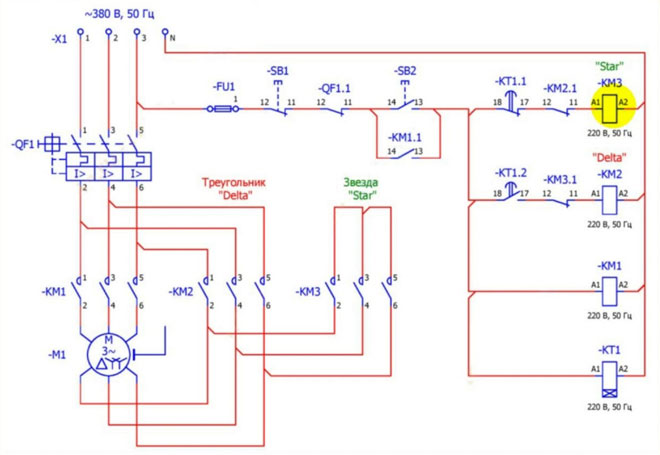
כאשר לחצן ההתחלה SB2 נלחץ, המנוע החשמלי מופעל על פי ערכת "כוכב". מגע ה-KM3 נמשך כלפי מעלה, המגעים שלו סוגרים את היציאות של פיתולי המנוע בצד אחד. המסקנות ההפוכות מחוברות לרשת, כל אחת לשלב שלה דרך אנשי הקשר של KM1. כאשר מגע זה מופעל, מתח תלת פאזי מופעל על הפיתולים והרוטור של המנוע החשמלי מונע. לאחר זמן מסוים שהוגדר על ממסר KT1, סליל ה-KM3 עובר, הוא מנותק, מגע ה-KM2 נדלק, ומעביר את הפיתולים ל"משולש".
ההחלפה מתרחשת לאחר שהמנוע צבר מהירות. ברגע זה ניתן לשלוט על ידי חיישן המהירות, אך בפועל הכל קל יותר. המיתוג נשלט ממסר זמן - לאחר 5-7 שניות, זה נחשב כי תהליכי ההתנעה הושלמו, ואתה יכול להפעיל את המנוע במצב כוח מרבי. לא כדאי לעכב את הרגע הזה, שכן פעולה ממושכת עם עודף העומס המותר ל"כוכב" עלולה להוביל לכשל של הכונן החשמלי.
בעת יישום מצב זה, זכור את הדברים הבאים:
- מומנט ההתנעה של מנוע עם פיתולי כוכב נמוך משמעותית מערכו של מאפיין זה של מנוע חשמלי עם חיבור דלתא, ולכן לא תמיד ניתן להתניע מנוע חשמלי עם תנאי התנעה קשים בדרך זו. זה פשוט לא יכנס לרוטציה. מקרים כאלה כוללים משאבות מונעות חשמלית הפועלות בלחץ גב וכו'. בעיות דומות נפתרות בעזרת מנועים עם רוטור פאזה, מה שמגדיל בצורה חלקה את זרם העירור בעת ההפעלה. התחלת כוכבים משמשת בהצלחה כאשר עובדים עם משאבות צנטריפוגליות הפועלות על שסתום סגור, במקרה של עומסי מאוורר על פיר המנוע וכו'.
- פיתולי המנוע חייבים לעמוד במתח הקו של הרשת. חשוב לא לבלבל בין מנועי D/Y 220/380 וולט (בדרך כלל מנועים אסינכרוניים בעלי הספק נמוך עד 4 קילוואט) לבין מנועי D/Y 380/660 וולט (בדרך כלל 4 קילוואט ומעלה). רשת 660 וולט כמעט ואינה בשימוש בשום מקום, אבל רק מנועים חשמליים עם מתח מדורג זה יכולים לשמש עבור מיתוג כוכב-דלתא. כונן 220/380 ברשת תלת פאזית מופעל רק על ידי "כוכב". לא ניתן להשתמש בהם בסכימת המעבר.
- יש לשמור על הפסקה בין כיבוי מגע "כוכב" לבין הפעלת מגע "משולש" על מנת למנוע שכבות על. אבל אי אפשר להגדיל אותו מעבר לכל מידה כדי למנוע את עצירת המנוע החשמלי. בעת יצירת מעגל בעצמך, ייתכן שיהיה עליך לבחור אותו בניסוי.
מתג היפוך מופעל גם. זה הגיוני אם מנוע חזק פועל באופן זמני עם עומס קטן.יחד עם זאת, מקדם ההספק שלו נמוך, מכיוון שצריכת החשמל הפעילה נקבעת לפי רמת העומס של המנוע החשמלי. תגובתי, לעומת זאת, נקבעת בעיקר על ידי השראות הפיתולים, שאינה תלויה בעומס על הציר. כדי לשפר את היחס בין הכוח הפעיל והתגובתי הנצרך, אתה יכול להעביר את הפיתולים למעגל "כוכב". ניתן לעשות זאת גם באופן ידני או אוטומטי.
ניתן להרכיב את מעגל המיתוג על אלמנטים נפרדים - ממסרי זמן, מגעים (סטרטרים) וכו'. כמו כן מיוצרים פתרונות טכניים מוכנים המשלבים את מעגל המיתוג האוטומטי בבית אחד. יש צורך רק לחבר מנוע חשמלי וכוח מרשת תלת פאזית למסופי הפלט. למכשירים כאלה עשויים להיות שמות שונים, למשל, "ממסר זמן התחלה" וכו'.
להפעלת פיתולי המנוע על פי תוכניות שונות יש יתרונות וחסרונות. הבסיס לפעולה מוכשרת הוא הידע של כל היתרונות והחסרונות. אז המנוע יחזיק מעמד זמן רב, ויביא אפקט מרבי.
מאמרים דומים: